Seeed XIAO RP2040とMAX485でDMX512制御
概要
前回の記事・DMX Shield for ArduinoをリバースエンジニアリングでArduino UNOとMAX485を使ったDMX512制御について理解できたので、私の中でブームとなっているSeeed XIAO RP2040で同じことをしてみます。
Seeed XIAO RP2040は性能が良い・小さい・安いとメリットの大きいマイコンモジュールです。
2コアを生かしたマルチスレッド処理も出来るので、片方のコアはDMXを送信し続け、もう片方のコアでその他の作業をする方向で実装していきます。
実行環境
MCU: Seeed XIAO RP2040
IDE: Arduino IDE 1.8.19 windows(portable)
回路図
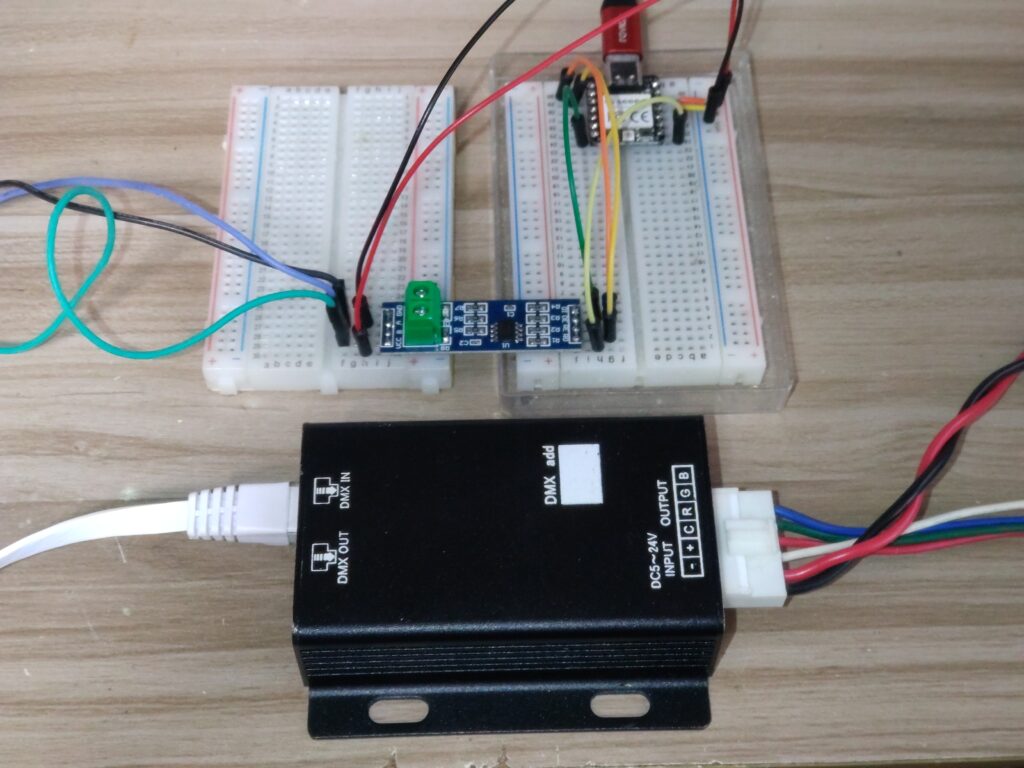
MAX485はAmazonで購入したモジュールを使用します。

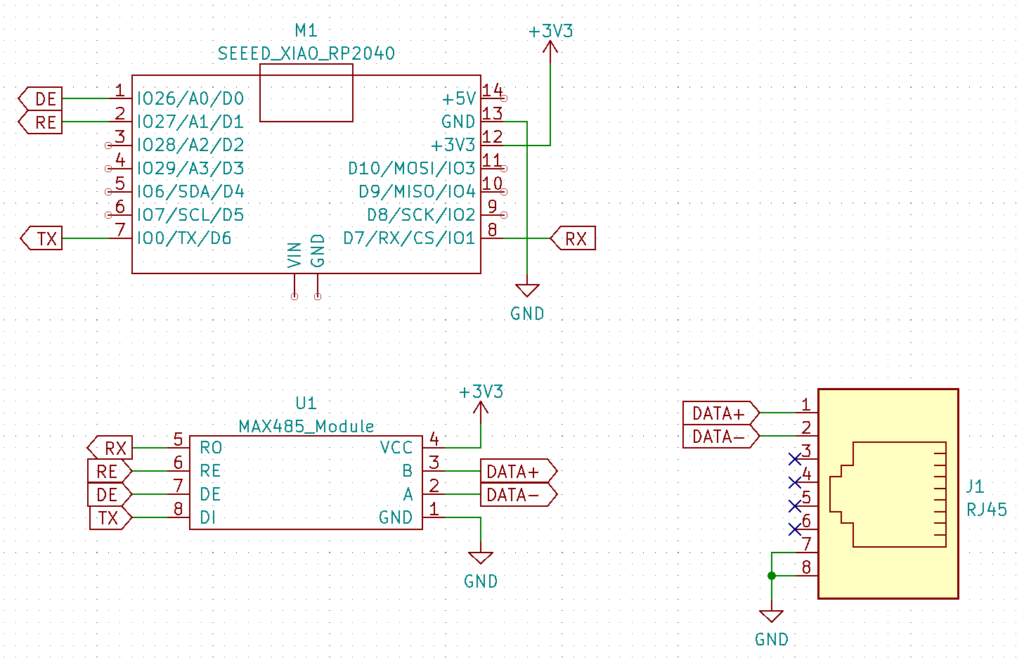
以下が回路図です。
XIAO RP2040とMAX485モジュールを繋ぐだけなので、回路図というより配線図ですね。
RJ45は手頃なコネクタが無かったので、冒頭の写真のようにLANケーブルを切ってQIコネクタに変換して接続しています。
プログラミング
上手くいったスケッチ
結論から言うと、下記のコードで動作しました。
これをXIAO RP2040に書き込んで、LEDを接続したDMXデコーダに接続すると以下の動作になります。
| チャンネル | LEDの挙動 |
|---|---|
| CH1 | 94.1%で点灯 |
| CH2 | 66.7%で点灯 |
| CH3 | 39.2%で点灯 |
| CH4 | 11.8%で点灯 |
DMX信号は常に送信されており、メインルーチンとなるloop()の中でvalue[ch]を変更すると送信するデータが変更されるプログラムになっています。
今後はI2C通信やSPI通信、タイマー制御も同時にしたいので、可能な限りArduino標準の関数を使うことで他の機能を邪魔しないように作った結果、こうなりました。ここに辿り着いた経緯は後ほど説明します。
#define DE_PIN D0
#define RE_PIN D1
const char START_CODE = 0;
char value[513] = {0};
void setup() {
/* GPIOの設定 */
pinMode(DE_PIN, OUTPUT);
pinMode(RE_PIN, OUTPUT);
digitalWrite(DE_PIN, HIGH);
digitalWrite(RE_PIN, LOW);
/* DMX送信用のシリアルポートの設定 */
Serial1.begin(49950, SERIAL_8N2);
}
/* メインルーチン(core0を使用) */
void loop() {
value[1] = 240;
value[2] = 170;
value[3] = 100;
value[4] = 30;
}
/* DMX送信用ルーチン(core1を使用) */
void loop1() {
/* BreakとMABの送信 */
uart_set_baudrate(uart0, 49950);
Serial1.write(START_CODE);
Serial1.flush();
/* スタートコードとCH1~CH512の値を送信 */
uart_set_baudrate(uart0, 250000);
for (int i = 0; i <= 512; i++) {
Serial1.write(value[i]);
}
Serial1.flush();
}
スケッチの解説
DMX Shield for ArduinoをリバースエンジニアリングではUARTのボーレート変更がカギだということがわかりました。ただ、Arduinoリファレンスでシリアル通信の関数を調べてもボーレートを通信中に変更する関数はありませんでした。
ArduinoのSerialライブラリでは、ボーレートの設定はSerial.begin()でしか行っていないようです。なのでbegin()のソースを確認しました。(これを探すのが大変だった…)
※SerialUART.cppを確認していますが、本当にこのbegin()を使っているか自信がありません。もしかしたら他ファイルの同名の関数が実行されているのかも…。詳しい方がいましたらコメントをお願いします。
void SerialUART::begin(unsigned long baud, uint16_t config) {
if (_running) {
end();
}
_overflow = false;
_queue = new uint8_t[_fifoSize];
_baud = baud;
uart_init(_uart, baud);
int bits, stop;
uart_parity_t parity;
~~~ 以下省略 ~~~
uart_init()でボーレートを設定しているので、ソースを確認します。
uint uart_init(uart_inst_t *uart, uint baudrate) {
invalid_params_if(UART, uart != uart0 && uart != uart1);
if (clock_get_hz(clk_peri) == 0)
return 0;
uart_reset(uart);
uart_unreset(uart);
#if PICO_UART_ENABLE_CRLF_SUPPORT
uart_set_translate_crlf(uart, PICO_UART_DEFAULT_CRLF);
#endif
// Any LCR writes need to take place before enabling the UART
uint baud = uart_set_baudrate(uart, baudrate);
uart_set_format(uart, 8, 1, UART_PARITY_NONE);
// Enable the UART, both TX and RX
uart_get_hw(uart)->cr = UART_UARTCR_UARTEN_BITS | UART_UARTCR_TXE_BITS | UART_UARTCR_RXE_BITS;
// Enable FIFOs
hw_set_bits(&uart_get_hw(uart)->lcr_h, UART_UARTLCR_H_FEN_BITS);
// Always enable DREQ signals -- no harm in this if DMA is not listening
uart_get_hw(uart)->dmacr = UART_UARTDMACR_TXDMAE_BITS | UART_UARTDMACR_RXDMAE_BITS;
return baud;
}
uart_set_baudrate(uart, baudrate)がボーレートの設定用関数のようです。
念のため、ソースを確認します。
uint uart_set_baudrate(uart_inst_t *uart, uint baudrate) {
invalid_params_if(UART, baudrate == 0);
uint32_t baud_rate_div = (8 * clock_get_hz(clk_peri) / baudrate);
uint32_t baud_ibrd = baud_rate_div >> 7;
uint32_t baud_fbrd;
if (baud_ibrd == 0) {
baud_ibrd = 1;
baud_fbrd = 0;
} else if (baud_ibrd >= 65535) {
baud_ibrd = 65535;
baud_fbrd = 0;
} else {
baud_fbrd = ((baud_rate_div & 0x7f) + 1) / 2;
}
// Load PL011's baud divisor registers
uart_get_hw(uart)->ibrd = baud_ibrd;
uart_get_hw(uart)->fbrd = baud_fbrd;
// PL011 needs a (dummy) line control register write to latch in the
// divisors. We don't want to actually change LCR contents here.
hw_set_bits(&uart_get_hw(uart)->lcr_h, 0);
// See datasheet
return (4 * clock_get_hz(clk_peri)) / (64 * baud_ibrd + baud_fbrd);
}
引数のボーレートをレジスタのパラメータに変換して、レジスタ書き込み用関数を実行しているようです。
ということでuart_set_baudrate(uart, baudrate)を使えば、既製品のDMXシールドと同じ動作をさせられることになります。
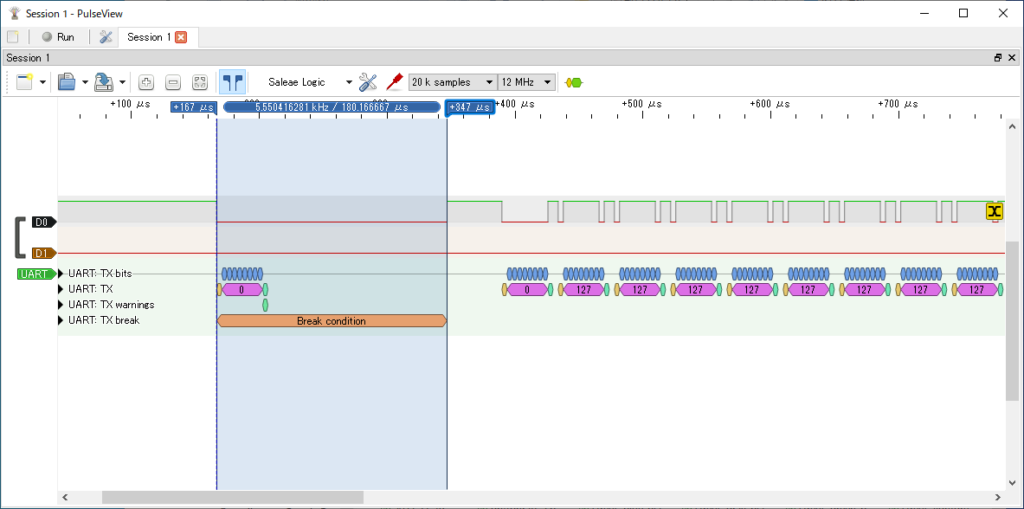
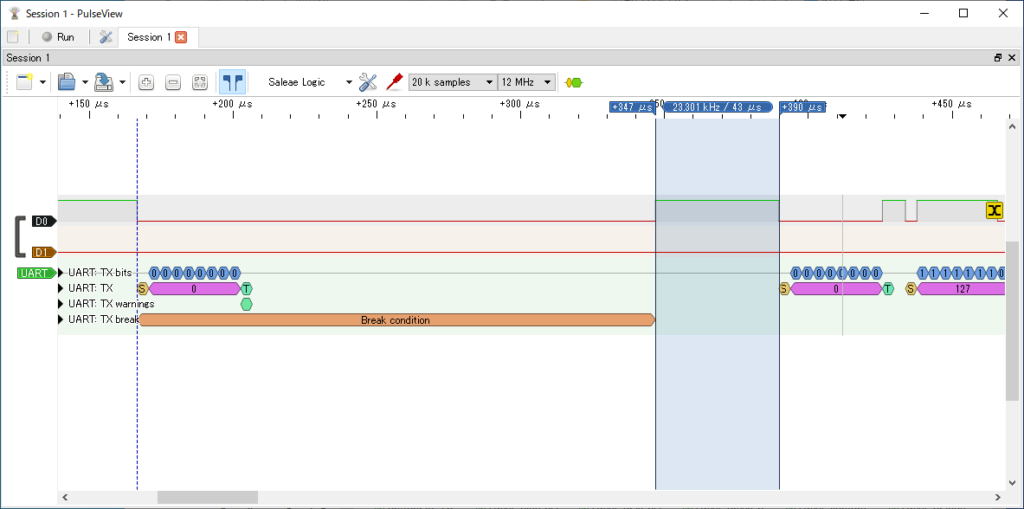
信号波形の確認
DATA+とGND間の電圧波形をロジックアナライザで確認しました。
BreakとMABの長さがDMX Shield for Arduinoをリバースエンジニアリングで計算した時間とほぼ同じになっています。
まとめ
Arduinoを使わずにSTM32とかPICとか普通のマイコンでやった方が簡単なのに…と何度も思いながら調べましたが、豊富なライブラリを使ってシンプルなコードを書くならArduinoなので頑張ってみました。