スコッチヨーク機構によるオブジェの駆動
概要
オブジェを高速で上下させる機構と駆動回路の依頼をいただき、実現可能かを検証するために原理試作をしました。
回転数を何段階か切り替えたいとのことでしたので、回転センサー付きのモーターを採用しています。
実際はこの後に色々と微修正したものを作成し、お客様にてご用意いただいたオブジェと組み合わせて納品しています。
引き合いから納品まで3週間という短納期でしたが、お客様にも最大限ご協力いただき、無事に納品することが出来ました。
原理試作の動画
設計の特徴
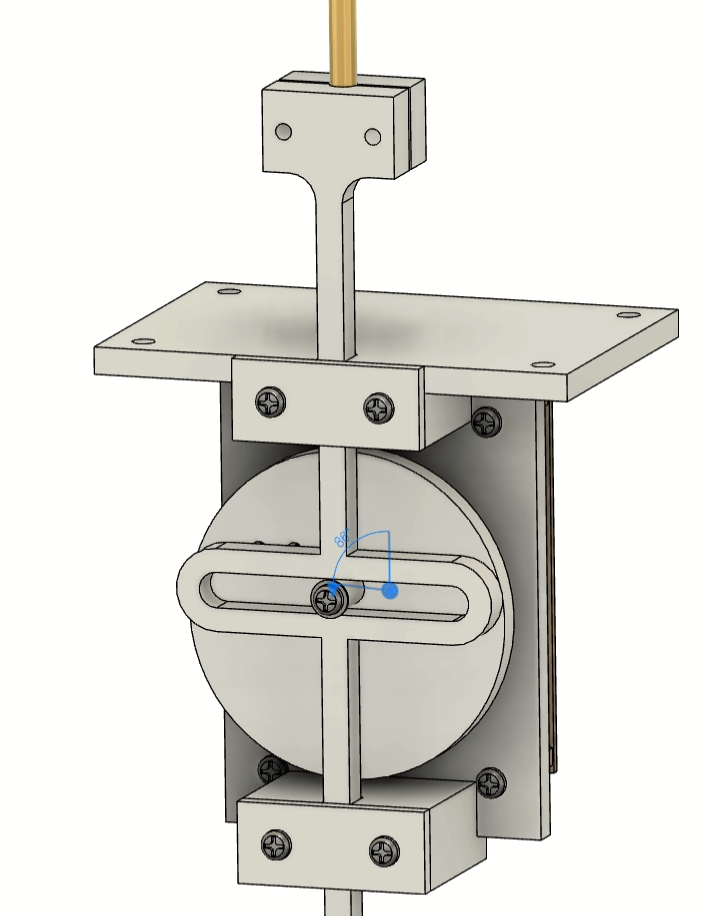
機構設計
機構部分はFusion360で設計し、3Dプリンターを使ってABSで製作しました。
左右のブレや機構部分のバックラッシは問題にならない仕様だったため大雑把な設計になっています。原動車のピンは高速回転によって部品がチビらないよう、M3ビスに樹脂スペーサーを被せています。
また現場合わせで往復運動のストロークを調整する必要があったため、原動車にピンを固定するためのネジ穴を複数用意し、ピンの回転半径を変更できるように設計しています。
回路設計
モーターは回転数を検知できるよう、磁気エンコーダー付きのものを採用しています。
この時点ではオブジェの設計が決まっていなかったため、出力の高いDCモーターを採用しました。
駆動回路はシンプルで、マイコン・モータードライバIC・スイッチ用入力回路・速度指示用の可変抵抗を組んだだけのものです。
制御設計
速度はエンコーダ信号を元にPID制御で調整しています。かなりの短納期だった上に負荷の大きさが納品時まで未定だったため最終形でのゲインの事前検証が出来ず、ハンチングしないようゲインをかなり小さくしています。そのため、ほぼP制御のみでゆっくりと指令値に近付ける形になっています。(通常は限界感度法+手作業でのチューニングで要求仕様に合わせてゲインを調整しています)